

Rover VL com Modelix
Artigo: Vander da Silva Gonçalves
Chegou o grande dia, agora você faz parte de um grupo de engenheiros de uma grande agência espacial, sua
missão como projetista é construir um veículo capaz de andar sozinho no solo de Marte. Como seria este
projeto? Quais materiais utilizar? As possibilidades são várias, faremos este ROVER VL utilizando o kit
Fundamental 2 da Modelix. Borá lá!
História
O homem sempre foi curioso por natureza, foi assim em suas conquistas, viajando de navio pelos mares do nosso planeta, descobrindo e conquistando, foi quando em um olhar para alto, passamos a observar nosso satélite natural, a lua. Chegamos lá com a Apollo 11 em um voo espacial tripulado, com os astronautas Neil Armstrong e Buzz Aldrin, com o módulo lunar Eagle em 1969, projeto audacioso que a NASA e seus engenheiros construíram. Estamos em um novo século, já descobrimos e aprendemos bastante, mas ainda falta ir para Marte, nosso planeta vermelho.
Temos Rover's e satélites lá, mas a pergunta que fica! O que fazer estando lá? Com essa ideia, vamos construir o Rover VL utilizando esse kit, agora sim, será possível embarcar nesta viagem fantástica! Bora lá!
Vamos Montar?
Figura 01


Figura 02
Utilizaremos um par de vigas 3D de 5 furos e 5 de vigas 2/3 furos, entre parafusos e barras de metal, para construção da parte central, onde em conjunto com a estrutura, sustentarão os dois pares de rodas, servindo também como sustentação para parte dianteira e traseira, como mostra a figura 1. As estruturas são espelhadas, onde na segunda estrutura foram acrescentados o motor e a engrenagem, como mostra a figura 2. Fixamos com parafusos, arruelas e porcas, as barras laterais de metal, com as vigas 3D de 2/3 furos vou unir as duas, estruturas e fixar com as barras de metal, como mostrado na figura 1.
As rodas são do mesmo tamanho, assim fica com uma estética mais bacana, com as rodas em seu lugar na parte traseira da estrutura, utilizamos as borrachas de fixação O'ring para fixar o eixo, é possível ver na sequencia de imagem abaixo. Esta parte é bem simples de montar como visto, agora fixaremos algumas barras de metais em cima para deixar que a estrutura fique firme. Atenção, nesta parte, no eixo central é colocado um motor e 3 engrenagens, se colocássemos somente o motor teríamos problemas com o chamado torque ou a força do motor, e provavelmente nosso Rover VL andaria com dificuldades, com essa sacada podemos ter um carro um pouco lento e com muita força como podemos ver na imagem abaixo. Agora vamos deixar de lado e fazer a próxima parte, que é a estrutura dianteira do ROVER VL.






Parte dianteira
Aqui requer um pouco de cuidado, como no eixo central, onde nós colocamos a nossa engrenagem para conseguir o torque, nesta parte teremos que fazer uma caixa de redução para ter a mesma ideia anterior, pense em uma bicicleta precisando subir um morro, nós precisamos colocar na marcha lenta, onde iremos pedalar mas fazendo pouca força, em compensação terá um torque maior, com essa ideia podemos fazer uma caixa de redução para mover o Rover tanto para direita quanto para esquerda em movimentos lentos e precisos. O kit vem com dois motores que já possuem caixa de redução interna, são motores pequenos e com bom desempenho por sinal, que vamos chamar de atuadores, podemos também chamar de atuadores, os pares de LED's da figura 5, que serão os olhos do Rover VL. Vamos entender melhor o funcionamento da caixa de redução.

Parte Dianteira

Figura 05
Caixa de redução


Todo carro tem sua caixa de marcha, com o Rover VL não poderia ser diferente, precisamos ter força e tração para ele se mover no chão irregular de Marte, onde a velocidade não é tão importante.
O Rover será o veículo que enfrentará todo tipo de intempéries, e por conta disso, a caixa de redução é uma das peças fundamentais para que a tração desse Rover seja um sucesso. "Esse conjunto de engrenagem reduz a velocidade final para o aumento
expressivo de torque. Tendo direta relação entre os tamanhos e os números de dentes da engrenagem, onde nos dá a taxa de redução da velocidade e também o aumento da força obtida. Se acoplarmos ao motor uma engrenagem com 10 dentes, e a esta engrenagem uma maior com 50 dentes, teremos uma taxa de redução de 1:5. Poderemos obter uma taxa ainda maior, acoplando sucessivamente outras engrenagens."
Texto referencia:
Programação
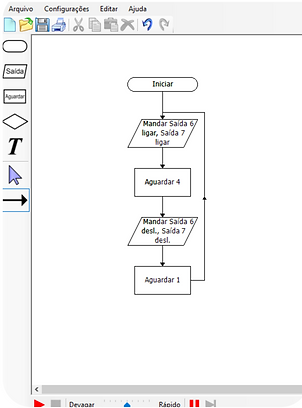
O Kit vem com manual e certificação de software, onde nos proporciona projetos e programações mais avançadas e complexas, isso ocorre em uma evolução gradual. O software chama-se "Software Modelix System Starter" sua programação é feita por fluxograma.
Nossa ideia é fazer com que os olhos do nosso ROVER VL pisquem, ficando acessos por 4 segundos e desligado por 1 segundo, dando a impressão que está olhando e analisando o ambiente.
Estaremos disponibilizando este código com maiores detalhes em nosso canal no YouTube Vander LAB Channel.
Passo 1
Ao abrir o software aparecerá uma guia para selecionar a opção: "Conectar-se a uma outra interface", selecione Modelix 3.6 apertando "ok".
Passo 2
Na guia vertical esquerda encontra-se vários comandos, figura 8.
Passo 3
Na barra vertical da esquerda clique no bloco iniciar, (aqui é o começo da programação), em seguida no bloco saída selecionando o bloco "saída" e colocaremos os pinos 6 e 7 "ligar".
Passo 4
Selecione o bloco aguardar, e coloque 4 segundos.
Passo 5
Temos que desligar para isso selecione novamente o bloco "saída" e coloque os pinos 6 e 7 desligado.
Passo 6
Para que ele pisque, precisamos selecionar o bloco "aguardar" e colocar por 1 segundo.
Passo 7
Clique no bloco "linha", em seguida clique no "Aguardar 1" e no bloco "Mandar Saída 6 ligar, Saída 7 ligar" para que o loop aconteça.
Passo Final
Na guia a direita, clique na opção "Clique para Conectar", em seguida "Clique para Download".
Aguarde que seu código será compilado para o microcontrolador, e os olhos já estarão funcionando como na imagem abaixo.
Programação
Um jeito diferente de fazer robótica.



Todo o sistema de motores é alimentado por 4 pilhas AA, colocado em um suporte de pilha atrás do joystick, alimentando os motores com 6 volts, já os olhos do nosso Rover VL, a alimentação é fornecida pelo microcontrolador que tem um suporte de pilha atrás, alimentando o mesmo.
Vamos finalizar nosso projeto colocando a capa protetora do nosso Rover VL, figura 10. Agora é só conectar o joystick e se divertir, nosso Rover VL está pronto para explorar o solo Marciano. O joystick está incluso no kit onde podemos controlar o projeto via cabo.
Este kit nos deixa com liberdade na montagem, assim em casa ou na escola você poderá fazer suas alterações e assim, achar novas soluções para o problema, use sua criatividade. Esta é a graça de trabalhar com robótica. Faça o seu projeto e nos marque pelo Instagram @Vander_lab. Bons estudos!
Finalizando
